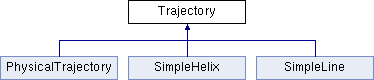
Abstract trajectory interface describing a geometrical path in 3D space. More...
#include <Trajectory.h>
Public Member Functions | |
| virtual LCVector3D | getPosition (double s, LCErrorMatrix *errors=0) const =0 |
| Position at path length s - s==0 corresponds to P.C.A to the origin. More... | |
| virtual LCVector3D | getDirection (double s, LCErrorMatrix *errors=0) const =0 |
| Direction at path length s, i.e. More... | |
| virtual LCErrorMatrix | getCovarianceMatrix (double s) const =0 |
| Full covariance Matrix of x,y,z,px,py,pz. More... | |
| virtual double | getPathAt (const LCVector3D position) const =0 |
| Pathlength at point on trajectory closest to given position. More... | |
| virtual double | getIntersectionWithPlane (LCPlane3D p, bool &pointExists) const =0 |
| Pathlength at closest intersection point with plane - undefined if pointExists==false. | |
| virtual double | getIntersectionWithCylinder (const LCCylinder &cylinder, bool &pointExists) const =0 |
| Pathlength at closest intersection point with cylinder - undefined if pointExists==false. More... | |
Detailed Description
Abstract trajectory interface describing a geometrical path in 3D space.
- Version
- Id:
- Trajectory.h,v 1.4 2006-10-24 08:54:22 tkraemer Exp
Member Function Documentation
|
pure virtual |
Full covariance Matrix of x,y,z,px,py,pz.
- Parameters
-
s path length
Implemented in SimpleLine, and SimpleHelix.
|
pure virtual |
Direction at path length s, i.e.
(dx/ds,dy/ds,dz/ds)
- Parameters
-
s path length errors 3x3 matrix, return argument - not computed if NULL
Implemented in SimpleLine, and SimpleHelix.
|
pure virtual |
Pathlength at closest intersection point with cylinder - undefined if pointExists==false.
- Parameters
-
cylinder cylinder object to intersect with
Implemented in SimpleLine, and SimpleHelix.
|
pure virtual |
Pathlength at point on trajectory closest to given position.
In order to get the distance use for example:
LCVector3D pt = t.getPosition( t.getPathAtClosestPoint( p ) ) ;
double d = LCVector3D( pt - p ).mag() ;
Implemented in SimpleLine, and SimpleHelix.
|
pure virtual |
Position at path length s - s==0 corresponds to P.C.A to the origin.
- Parameters
-
s path length errors 3x3 matrix, return argument - not computed if NULL
Implemented in SimpleLine, and SimpleHelix.
Referenced by MarlinCED::drawTrajectory().
The documentation for this class was generated from the following file:
